Gazebo visual interface#
Parrot Sphinx comes with an additional graphical interface that can be useful for advanced usages. It is the native HMI from Gazebo. To launch it, type the following command while Parrot Sphinx is running:
$ sphinx-gzclient
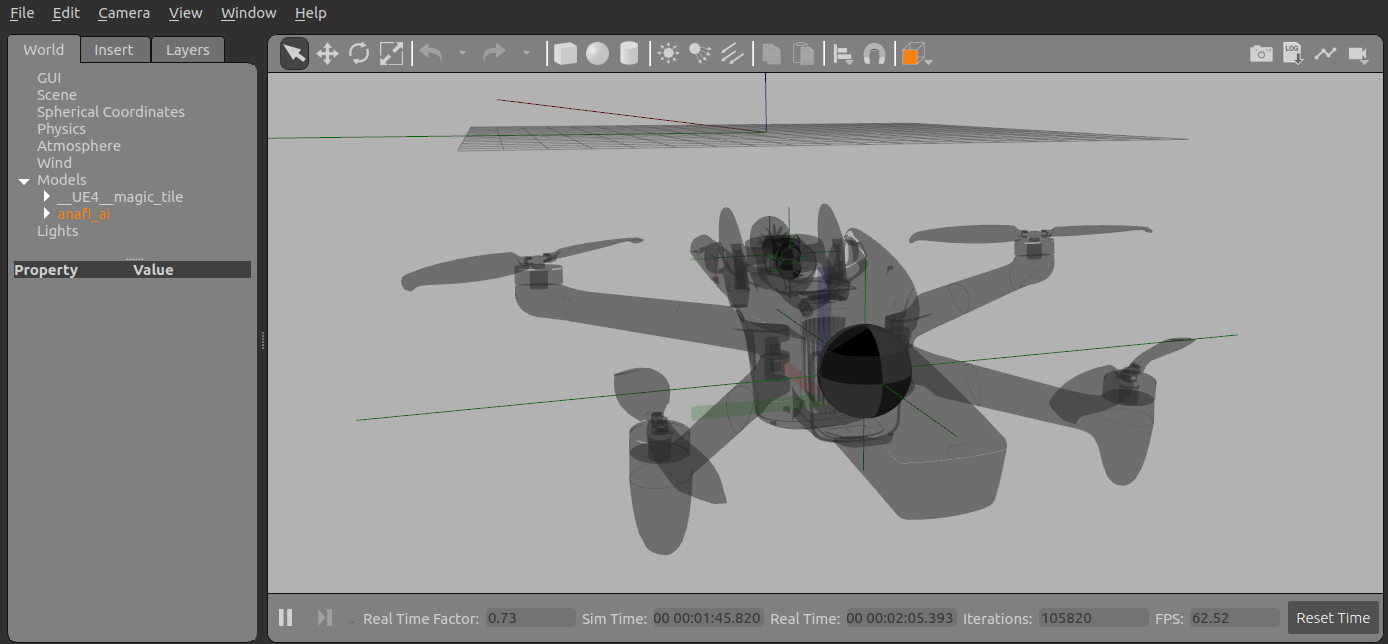
Unlike the UE4 application, it shows an almost empty scene containing only the drone and a tile. It lets you visualize specific information related to the physical aspect of the simulation, such as the location of the centers of gravity, the frame of each mechanical part, or the collision boxes.
It also allows you to apply forces and torques to the drone model.