Web dashboard#
In addition to the HMI provided by the UE4 applications, Parrot Sphinx offers a more technical HMI, accessible through your Web browser. It gives the ability to observe and modify at runtime internal and external parameters of the simulated drone.
To open the dashboard, run the following command.
$ sphinx-dashboard
Your default Web browser automatically shows up and loads the dashboard Web page, with the stored layout if any.
Inspector widget#
Once the Web dashboard is loaded, drag and drop the inspector widget as shown in the video below. A window listing the drone and world components that can be controlled will appear. At start-up, all entries are hidden since the tree is folded. You just need to unfold the part that you want to interact with, or use the search text box.
Two types of controls are available:
action: push on the button to execute the related action
parameter: click on the field itself to edit the text and enter a new value or click on the button next to it to edit the parameter in a new window
Plot widget#
Data can be observed on one or several graphs in the Web dashboard. All graphs are refreshed as soon as new data are received.
To spawn a new graph, drag and drop the Plot widget wherever you wish in the
dashboard area.
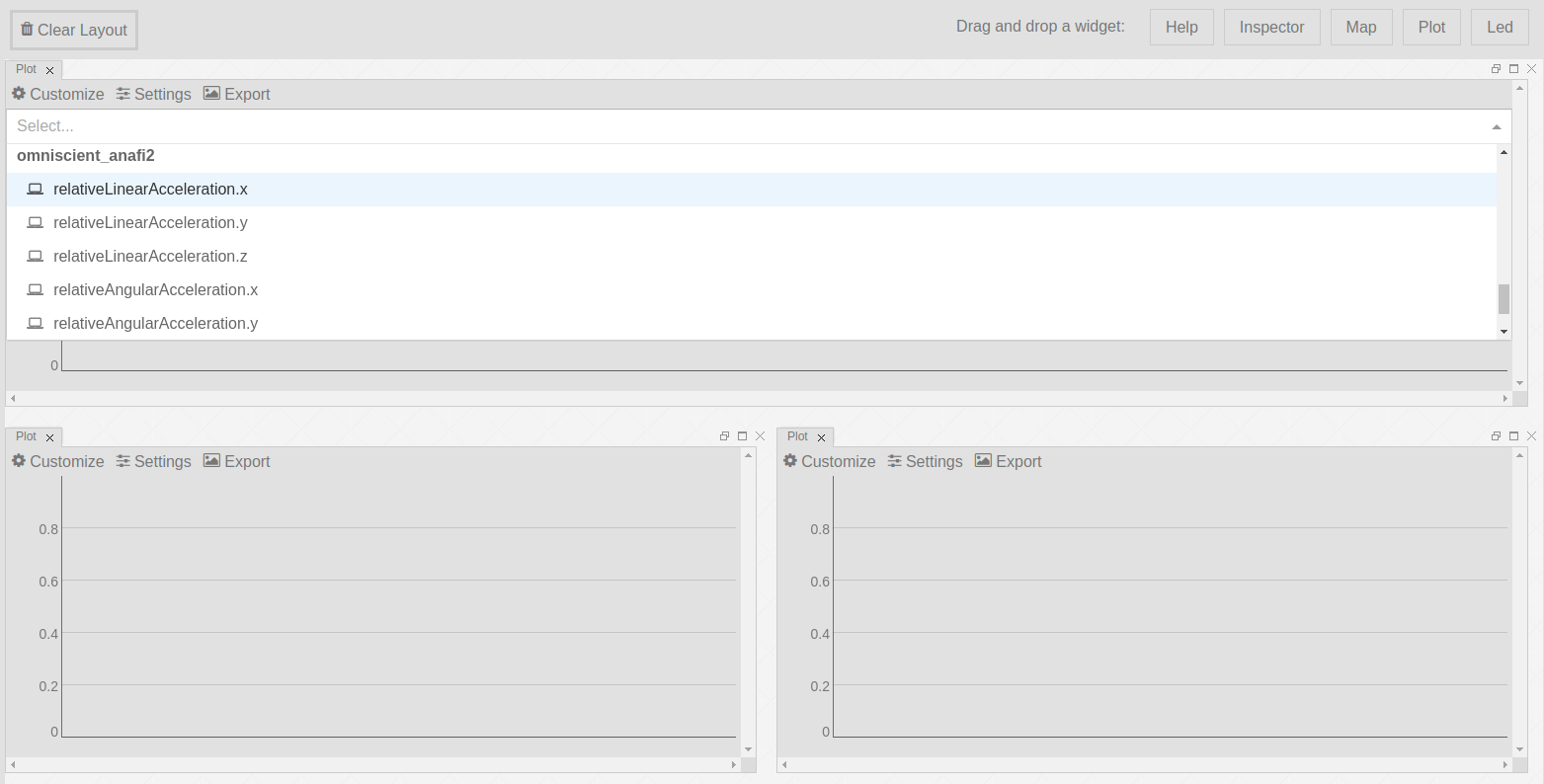
Then, select the data variable you want to observe by clicking on the button
customize. As the number of variables may be high, you may need to filter
variables by typing text or a
regular expression
in the text field.
Several variables can be plotted on the same graph. The X axis represents the time expressed in seconds.
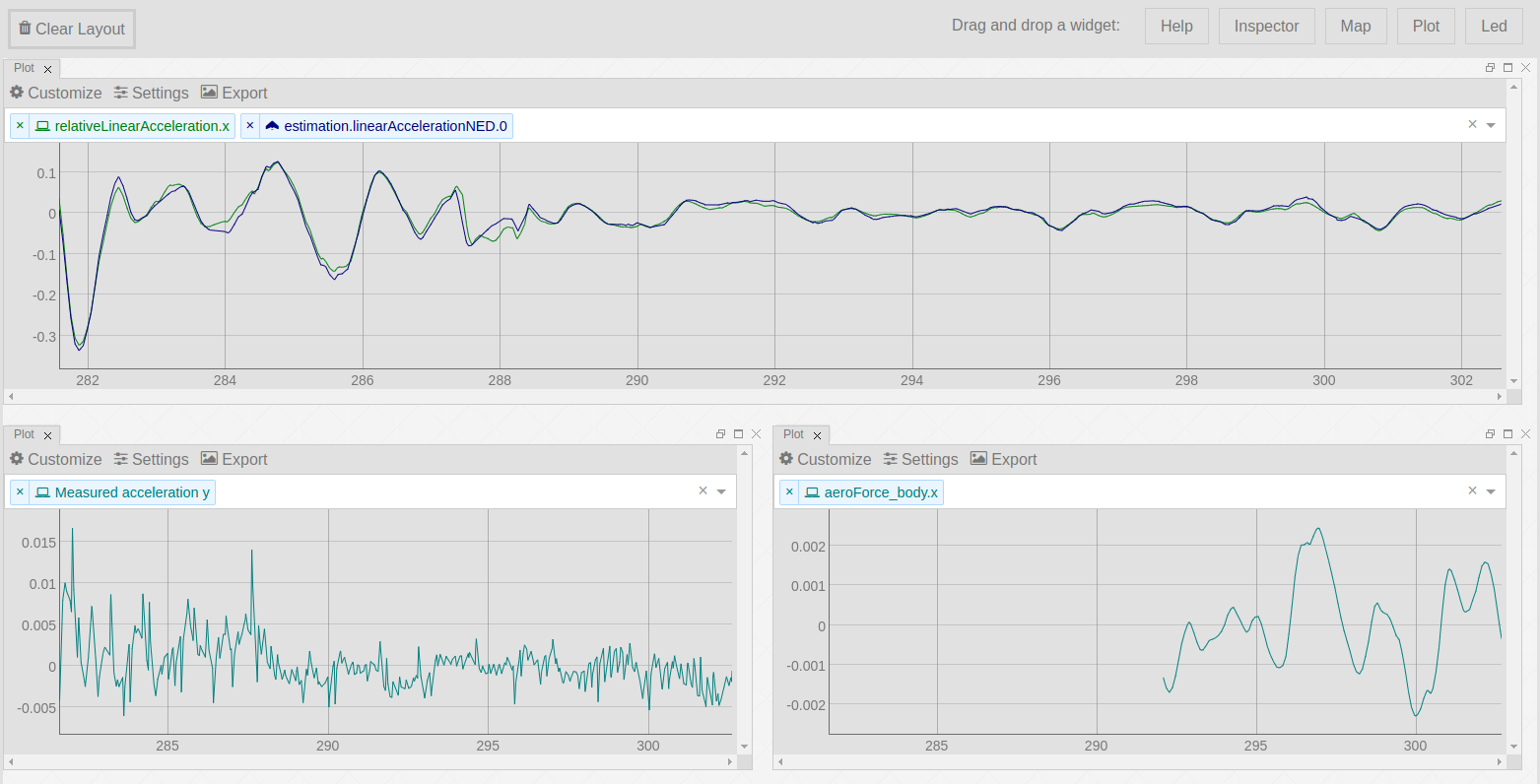
The graphs are interactive: you can mouse over to highlight individual values. You can click and drag to zoom (Ctrl-click to zoom in different components simultaneously). Double-clicking will zoom you back out (Ctrl-double-click to zoom back out in different components simultaneously). Shift-drag will pan.
Map widget#
Drag and drop a Map widget on your dashboard.
While the drone is flying, its trajectory and its heading are printed on top of the map area corresponding to the GPS coordinates of the scene. It is possible to zoom in/out and to switch to satellite view or to terrain view.