About coordinates#
What is a “pose”#
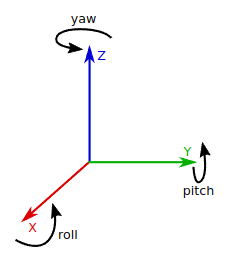
What we call a pose is a 6-component vector defining the position (X,Y,Z) and the orientation expressed as intrinsic z-y-x (or extrinsic X-Y-Z) Euler angles of a given point of the space:
x
y
z
roll (around x)
pitch (around y)
yaw (around z)
Here is how angle signs are handled in right-handed coordinate systems.
Coordinate systems and units#
Parrot Sphinx relies on with 3 distinct coordinate systems. From the end-user point of view, Gazebo system is the one that is exposed by default.
Gazebo
Right-handed
ENU (East-North-Up)
Length unit is meter.
Angle unit is rad.
Unreal Engine
Left-handed
ESU (East-South-Up)
Length unit is centimeter
Angle unit is degree
drone firmware
Right-handed
NED (North-East-Down)
Length unit is meter
Angle unit is rad
GPS#
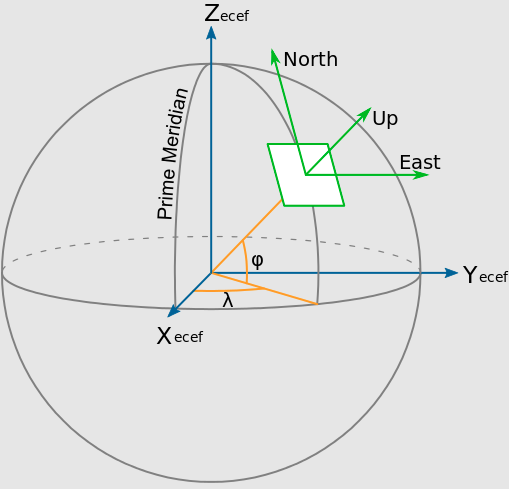
The origin [X, Y] in any Cartesian frame is generally set by default to the location of Parrot Headquarter, in Paris:
latitude: 48.878922°
longitude: 2.367782°
Some worlds may implicitly change this location, especially when the scene represents an existing area on the Earth.
It is also possible to customize the GPS coordinates of the origin of the scene, as explained in this section.