Glossary#
- Altitudes#
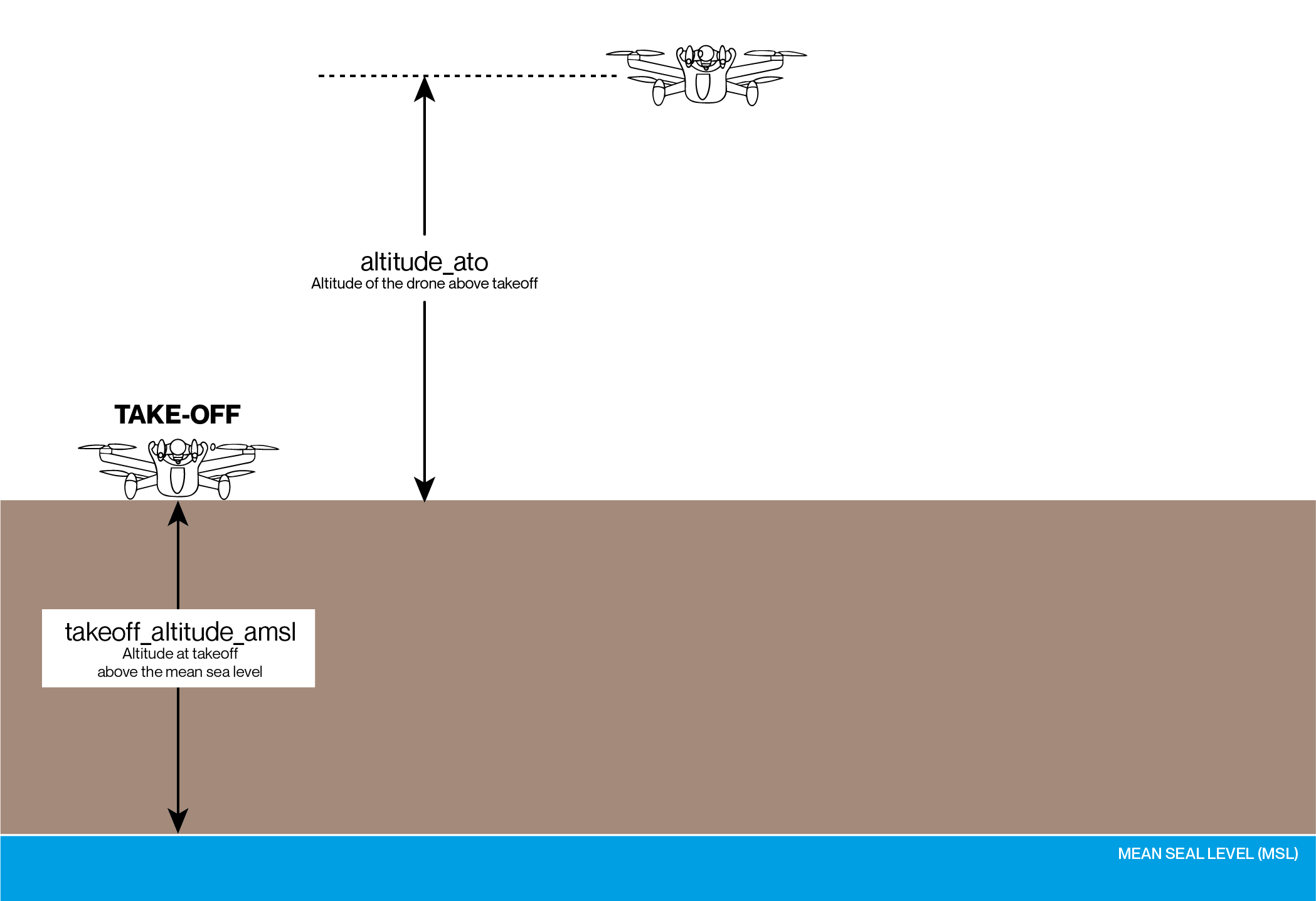
altitude_ato: Altitude above take-off.
takeoff_altitude_amsl: Altitude at take-off above the mean sea level.
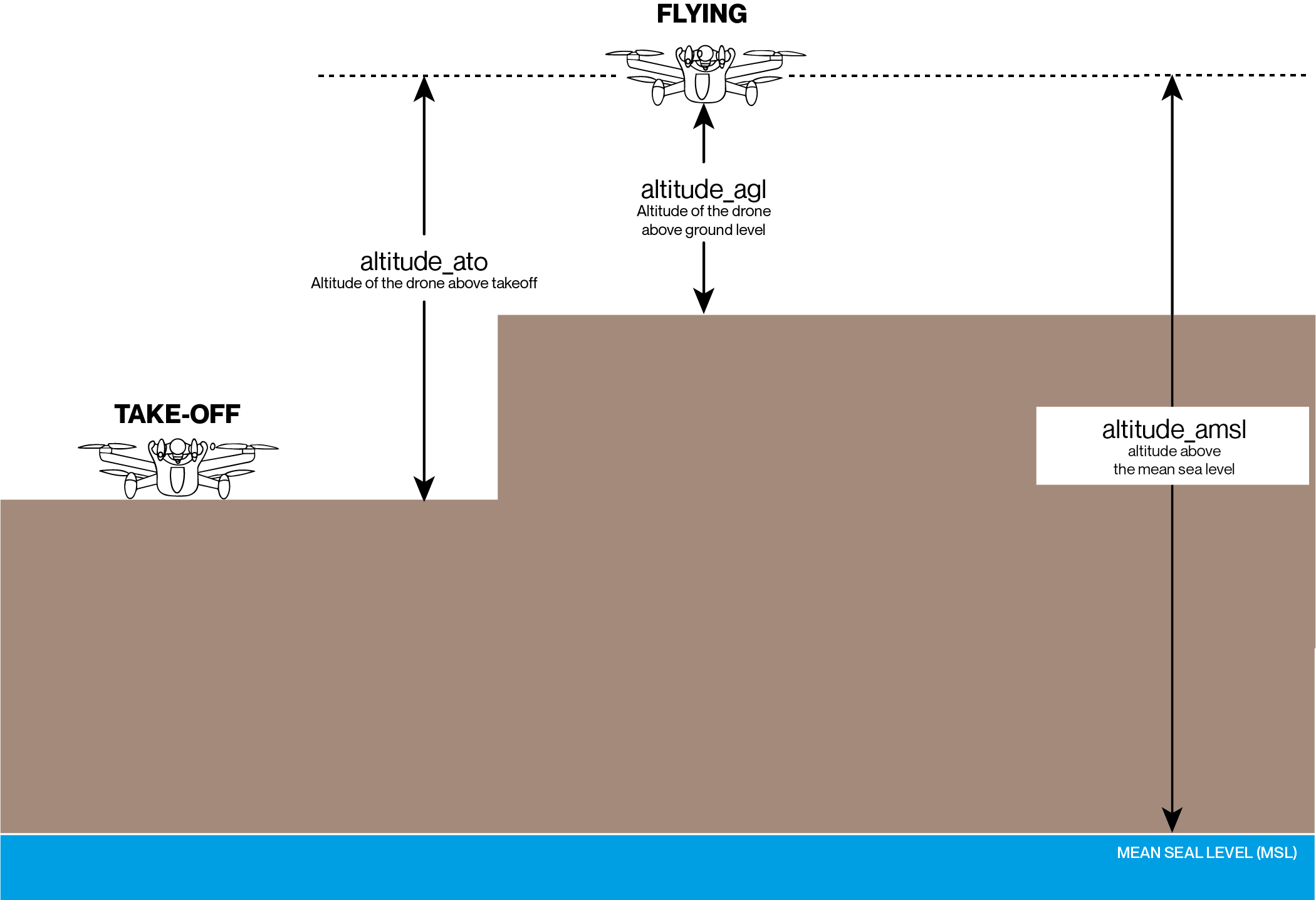
altitude_agl: Altitude above ground level.
altitude_amsl: Altitude above the mean sea level.
- Angular velocities#
Three-components vector: x, y, z. Expressed in Body basis.
- Attitude#
Attitudes are expressed in quaternion or in Euler angles to represent rotations. When expressed in quaternion, attitudes components are x, y, z, w and are normalized. When expressed in Euler angles, attitudes components are Yaw, Pitch, Roll angles. These follow the Euler/Tait-Bryan convention with the respective rotation order z (yaw), y (pitch), x (roll).
- EIS#
Electronic Image Stabilization.
- ESC#
Electronic Speed Controller. Controls motors speeds.
- Flight mission#
Onboard third-party software, performing autonomous flight planning, developed with Air SDK.
- FlightPlan#
List of waypoints autonomously followed by the drone.
- GCS#
Ground Control Station.
- IMU#
Inertial Measurement Unit (accelerometer and gyrometer).
- INS#
Inertial Navigation System (estimation algorithm fusing flight sensors).
- ISP#
Image Signal Processor.
- MIS#
Mechanical Image Stabilization.
- Mission UI#
Third-party mobile application.
- OpenFlight#
Open-source core of the Parrot GCS FreeFlight 7.
- RTH#
Return to home.
- TOF#
Time of flight. Infrared range finder located under the drone.
Vector bases#
- Three 3D vector bases are mainly used.#
- Note: It is assumed that Earth can be approximated flat over the flight area.#
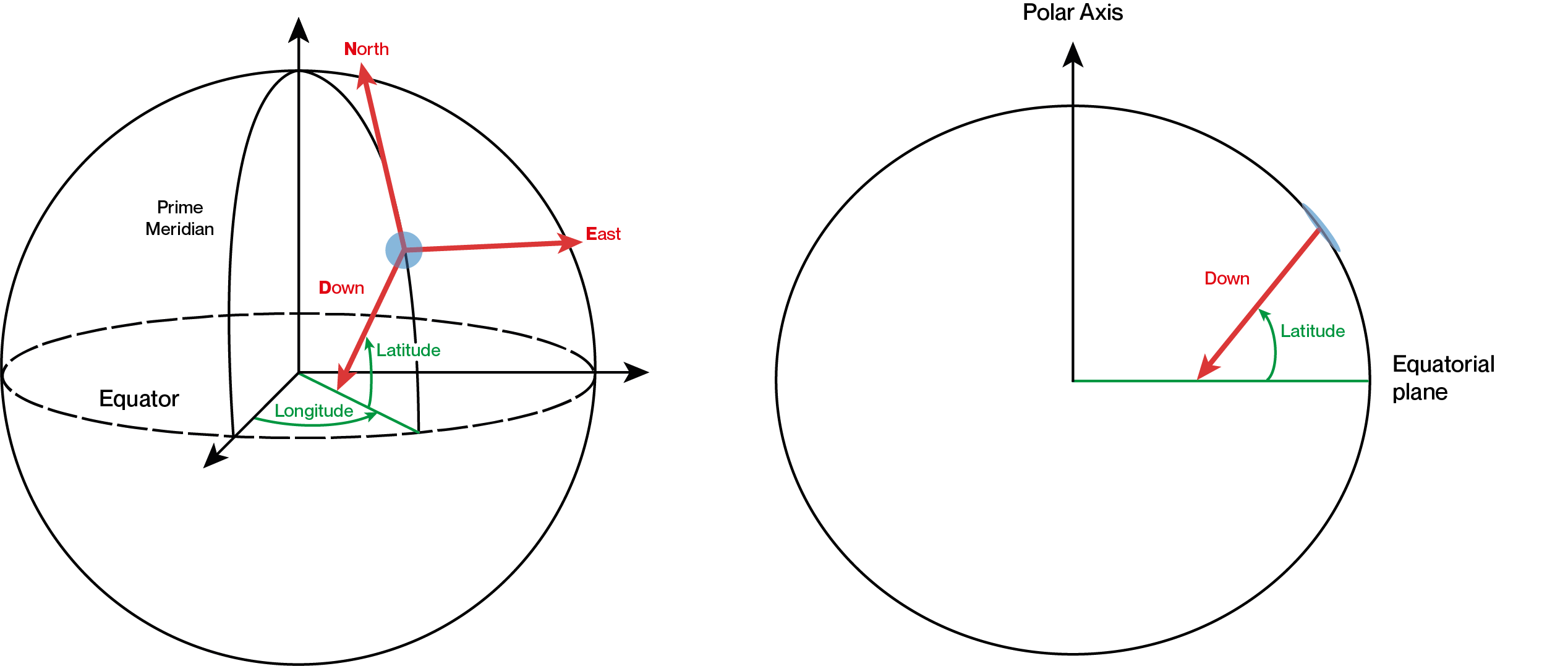
- NED basis#
The North-East-Down, ground-fixed vector basis, at first GPS fix position.
x-axis: North direction at first GPS fix position
y-axis: East direction at first GPS fix position
z-axis: Downward direction at first GPS fix position
- NED_start basis#
An arbitrary ground-fixed vector basis, set at start up, even without GPS fix.
x-axis: Arbitrary in the horizontal plane (normal to z axis)
y-axis: Given by the cross product of z and x axes’ unit vectors
z-axis: Downward direction at take off
- NED / NED_start offset#
Sharing a downward z-axis (locally flat Earth approximation), NED and NED_start bases only differ by a yaw offset (a rotation along the z axis). The value of this yaw offset is available in Drone Telemetry. NED is fixed in time, so the estimated drone yaw in this basis can jump in case of large estimator realignment e.g. due to a precise input measurement. NED_start has a rotation offset around the z axis relatively to NED. The estimated drone yaw in this basis does not jump in case of large estimator realignment, instead, the yaw offset between NED and NED_start jumps in order to ensure the continuity of the drone yaw estimate in this basis. This yaw offset is constant most of the time, but can jump during the flight.
- NED before first GPS fix#
Before the first GPS fix, the NED vector basis is set equal to the NED_start vector basis. Once a first GPS fix is achieved, the NED basis is reset, with the axes as specified above.
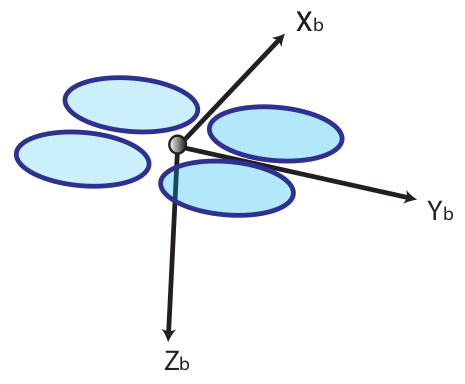
- Body basis#
The drone body-fixed vector basis. May be referred to as the “drone vector basis”.
x-axis: Longitudinal drone axis, pointing forward
y-axis: Lateral drone axis, toward the right of the drone when seen from above
z-axis: Vertical drone axis, pointing downward
Frames of reference#
- Four reference frames are mainly used.#
- Geographic frame#
Earth-centered Earth-fixed geographic frame of reference, in spherical coordinates.
latitude: North latitude in degrees
longitude: East longitude in degrees
altitude: Altitude above the mean sea level in meters
- Global frame#
The ground-fixed frame of reference, at first GPS fix position.
origin: Horizontal geographic position of first GPS fix, vertical position at take off
vector basis: NED
- Local frame#
An arbitrary ground-fixed frame of reference, set at take off, even without GPS fix.
origin: Arbitrary horizontal origin, vertical position at take off
vector basis: NED
- Global / Local offset#
Sharing the same vertical origin, Global and Local frames only differ by an horizontal offset (a translation along the x and y axes). The value of this horizontal offset is available in Drone Telemetry. Global is fixed in time, so the estimated drone position in this frame of reference can jump in case of large estimator realignment e.g. due to a precise input measurement. Local has a x/y horizontal position offset relatively to Global. The estimated drone position in this frame of reference does not jump in case of large estimator realignment, instead, the x/y position offset between Global and Local jumps in order to ensure the continuity of the drone position estimate in this frame of reference. This horizontal position offset is constant most of the time, but can jump during the flight.
- Global before first fix#
Before the first GPS fix, the Global frame is set equal to the Local frame. Once a first GPS fix is achieved, the Global frame is reset, with the origin and axes as specified above.
- Body frame#
The drone body-fixed frame of reference. May be referred to as the “drone frame of reference”.
origin: Center of mass of the drone (including its propellers and gimbals)
vector basis: Body
A word about NED basis and Global frame#
NED and Global data require an alignment of the Inertial Navigation System (INS), which is the transformation from body to navigation frame and bases. It covers attitudes, positions and velocities.
Pitch and Roll angles from body to NED are known from power-on with the accelerometer observing the gravity vector.
Yaw angle from body to True North (NED) is known after a first magnetometer measure (calibrated, no magnetic interference) and a first GPS measure whose location gives access to the local magnetic declination (angle from Magnetic North to True North).
Positions and Velocities in Global are available once Yaw alignment is complete. Positions in Global also require a first GPS measure to position the drone on Earth.