Guidance#
Description#
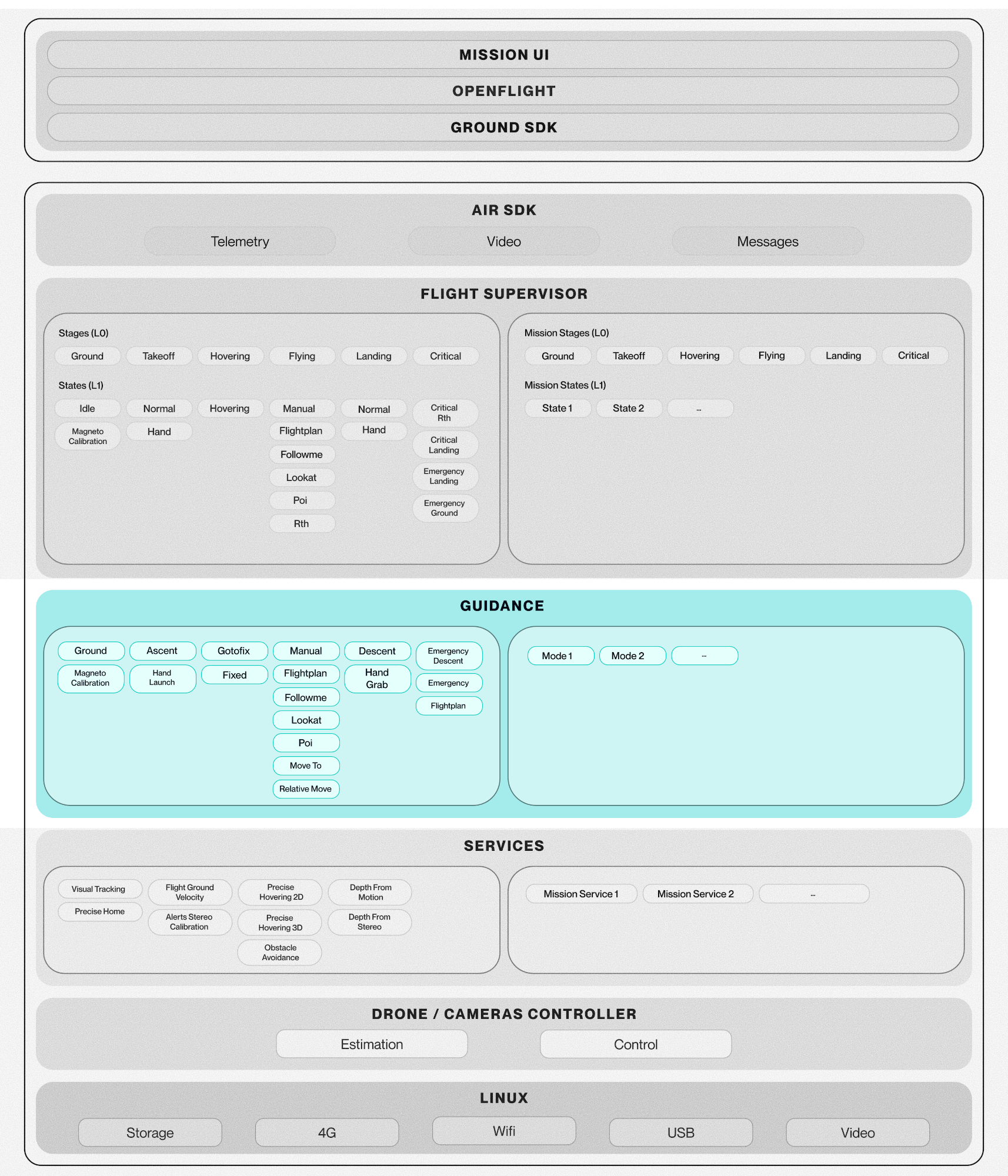
Guidance is in charge of trajectory generation for the drone and the cameras (front and stereo).
The generation of those trajectories is implemented in guidance::Mode class
corresponding to different behaviours.
For example the built-in FlightPlan mode will generate the trajectories that the
drone will follow. As well as the orientation of the cameras, given the list of
waypoints and view modes.
Guidance modes are enabled/disabled by the Flight supervisor.
Only one can run at a given time.
Each Guidance mode has three major steps:
Trajectory generation for horizontal and vertical translation
Trajectory correction using obstacle avoidance
Trajectory generation for cameras and drone yaw orientation
It is not mandatory to implement all of them. For example, Guidance modes can choose not to implement the trajectory correction. When no trajectory is specified, the drone keeps its previous one.
How to write a Guidance mode#
A Guidance mode can be written either in C++ or Python.
C++ modes are generated as .so files on build, while Python modes are
copied from source, the latter format uses the .py extension.
Each Guidance mode implements an object that inherits from the
guidance::Mode class.
The following class methods must be implemented:
The following class methods are optional:
guidance::Mode::generateDroneReference()
guidance::Mode::correctDroneReference()
guidance::Mode::generateAttitudeReferences()
Each Guidance mode must fill the output structure containing the drone and
camera trajectories, as well as camera axis configuration and
drone position and velocity targets: guidance::Output class
Sample#
See Hello Guidance mode.
How to switch between Guidance modes#
To switch from one Guidance mode to another, call
set_guidance_mode() function from the class fsup.genstate.State
containing a string with the name of the chosen Guidance mode. An event ModeChanged
is received once the switch is done.
Messages#
Guidance handles Commands and sends Events to Flight supervisor.