Video feeds#
Video feeds from different cameras:
frontal
vertical
stereo pair (left, right)
disparity map
depth map
depth from motion
occupancy grid
Frontal#
Frontal video feed parameters depend on recording and streaming configuration. The parameters for the default recording mode (4K UHD) are defined below.
Parameters |
Physical/Simulated drone |
|---|---|
Width (px) |
3840/1280 |
Height (px) |
2160/720 |
Format |
NV21 |
FPS |
30 |
Name |
fcam_recording |
Frontal video feed parameters for streaming.
Parameters |
Physical/Simulated drone |
|---|---|
Width (px) |
1920/1280 |
Height (px) |
1080/720 |
Format |
NV21 |
FPS |
30 |
Name |
fcam_streaming |
Vertical#
Video feed parameters from vertical camera.
Parameters |
Physical/Simulated drone |
|---|---|
Width (px) |
320 |
Height (px) |
240 |
Format |
grey (8 bits) |
FPS |
60 |
Hfov (°) |
53.71 |
Vfov (°) |
40 |
Name |
vcam_raw |

Stereo pipeline#
The stereo camera allows to compute 3D environment information. (see here for more details). The next schema represents the different feeds available.
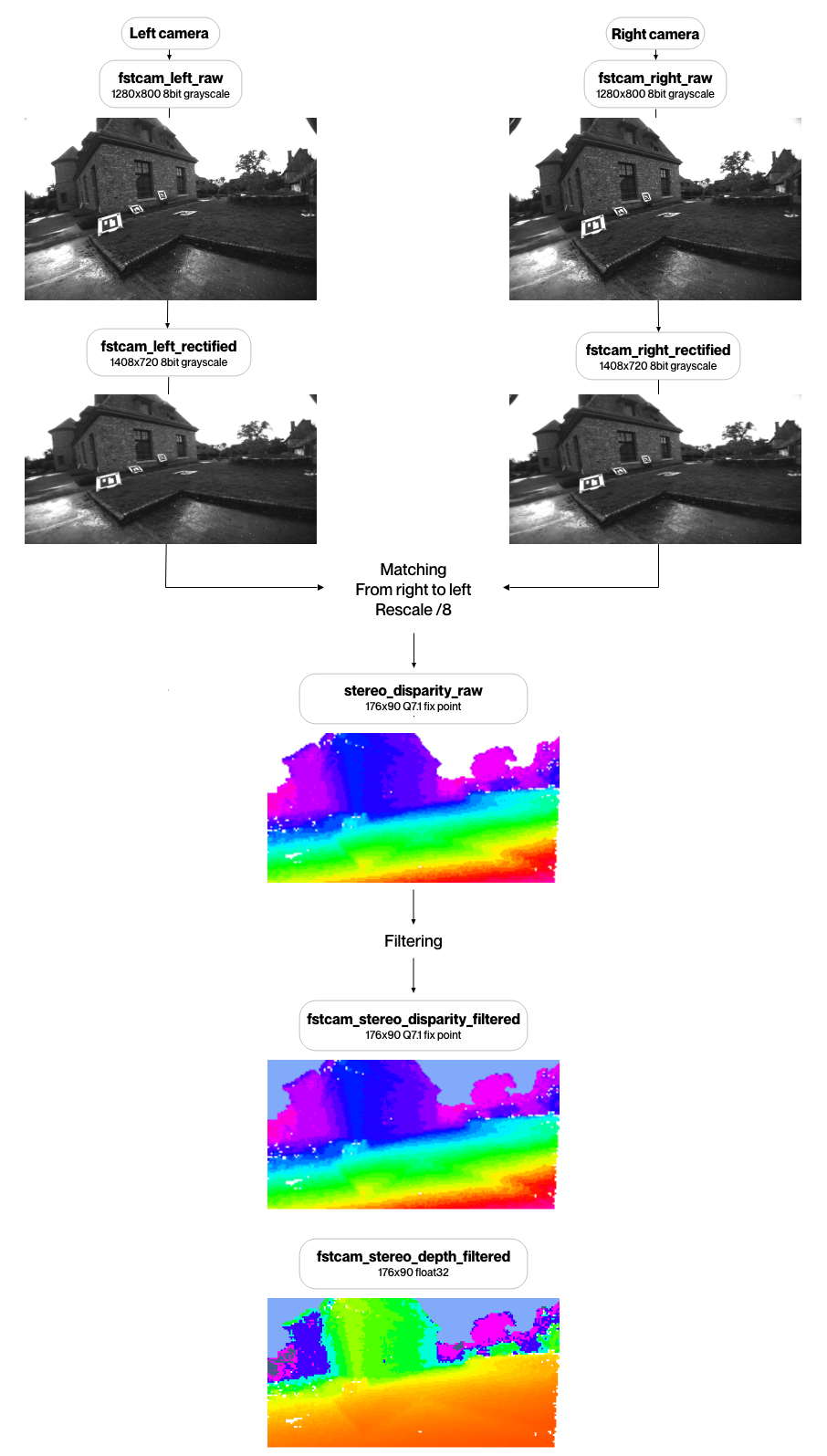
Stereo pair reference image#
Rectified video feed from the stereo right camera. The rectified image is computed using a pinhole camera model and stereo calibration.
Parameters |
Physical/Simulated drone |
|---|---|
Width (px) |
1408/1280 |
Height (px) |
720 |
Format |
grey (8 bits) |
FPS |
30 |
Hfov (°) |
110 |
Vfov (°) |
72 |
Name |
fstcam_right_rectified |
Disparity map#
Each pixel of the disparity map represents the distance between the corresponding point in stereo left and right camera. The disparity is given in the rectified right image reference. This is computed by comparing visual difference between left and right picture. If the disparity cannot be computed, the values are set to:
255Not available.254DroneMask in Left Stereo-Image.253DroneMask in Right Stereo-Image.252DroneMask in both Stereo Images.251Sky (infinite).
Parameters |
Physical/Simulated drone |
|---|---|
Width (px) |
176 |
Height (px) |
90 |
Format |
uint8 |
FPS |
30 |
Hfov (°) |
110 |
Vfov (°) |
72 |
Range |
[0 - 96] |
Name |
fstcam_stereo_disparity_filtered |
Note
The range of disparity values is [0 - 96] with a quantification step of 0.5. These values are integers, so they are stored in a range from [0 - 192].
Depth map#
Image containing depth information. The depth is computed from the disparity image. The depth is given in the rectified right image reference. If the depth cannot be computed, the values are set as NA (not available).
The depth information is the distance between the observed point and the image plane.
Parameters |
Physical/Simulated drone |
|---|---|
Width (px) |
176 |
Height (px) |
90 |
Format |
raw32 (interpreted as float32) |
FPS |
30 |
Hfov (°) |
110 |
Vfov (°) |
72 |
Range |
[30cm - 11m] |
Name |
fstcam_stereo_depth_filtered |
Occupancy grid#
3D map of the environment as an evenly spaced voxel. Each containing the probability of presence of an obstacle.
Probabilities are stored as logodd :
logodd(p) = log( p /(1-p) )
Value between [
-100-100].Value stored as int8.
Positive values mean that there is an obstacle in the voxel.
Negative values mean that the voxel is empty.
0value means that the information is unknown.
The occupancy grid size is 64x64x32, the dimension voxel is 0.4mx0.4mx0.4m.
The occupancy grid translates in NED along with the drone, so that the drone position is always in the middle of the grid (32x32x16).
The occupancy grid orientation never changes with respect to NED frame.