Enumerations (Parrot Specific)#
MAV_VIEW_MODE_TYPE#
Type of the view mode. This is how the vehicle should behave to set its orientation.
Label: |
Description |
Values |
|---|---|---|
VIEW_MODE_TYPE_ABSOLUTE |
Camera orientation is fixed between two waypoints. Orientation is changed to the waypoint yaw once the validation sphere is reached |
0 |
VIEW_MODE_TYPE_CONTINUE |
Camera orientation changes linearly between two waypoints |
1 |
VIEW_MODE_TYPE_ROI |
Camera orientation is given by a ROI |
2 |
VIEW_MODE_TYPE TRAVELLING |
Camera orientation is fixed between two waypoints. Orientation is changed to the waypoint yaw at the beginning (V2 only) |
3 |
Todo
lien de l’enum à différents endroits, VIEW_MODE_TYPE_ROI à partir de quand la commande est prise en compte, dessin ROI + explication du waypoint stop pour chaque view mode type
Example:
VIEW_MODE_TYPE_ABSOLUTE
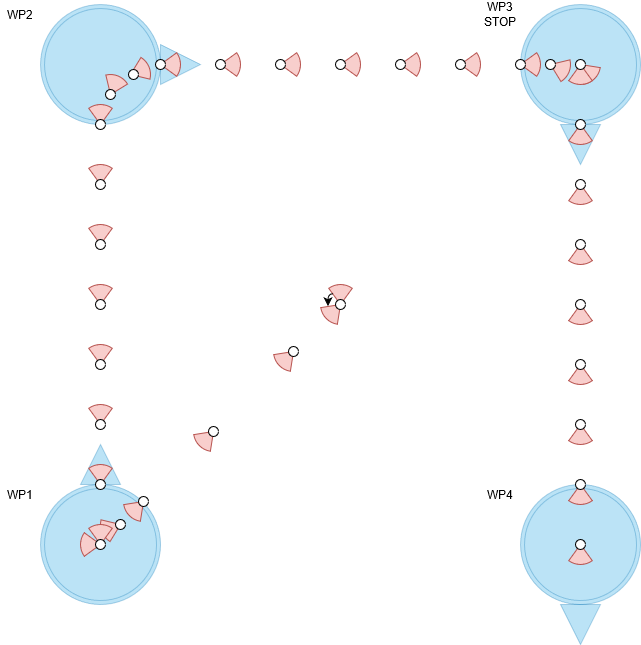
VIEW_MODE_TYPE_CONTINUE
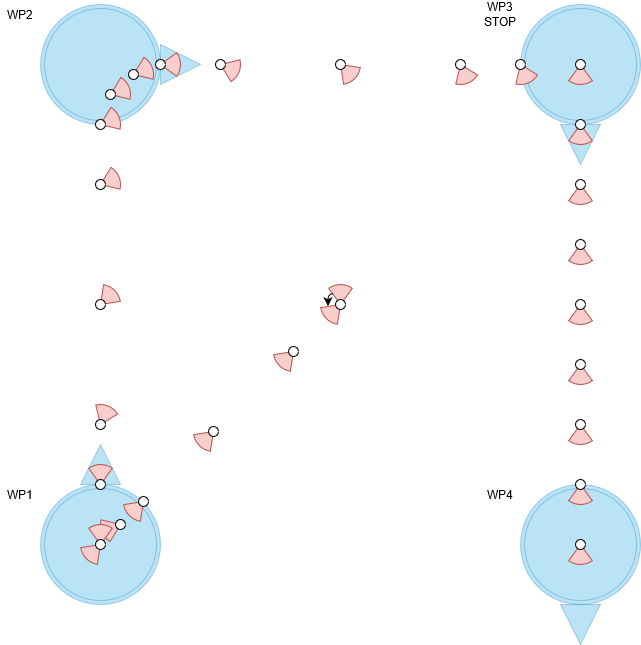
VIEW_MODE_TRAVELLING

MAV_PITCH_VIEW_MODE_TYPE#
Type of the pitch view mode. This is how the vehicle should behave to set its pitch orientation. It is overriden if the yaw view mode is set to ROI.
Label: |
Description |
Values |
|---|---|---|
PITCH_VIEW_MODE_TYPE_DIRECT |
Camera pitch’s orientation is fixed between two waypoints. Orientation is changed to the waypoint yaw at the beginning |
0 |
PITCH_VIEW_MODE_TYPE_CONTINUE |
Camera pitch’s orientation changes linearly between two waypoints |
1 |
MAV_STILL_CAPTURE_MODE_TYPE#
Type of still capture mode that is performed upon a still capture initiation.
Label: |
Description |
Values |
|---|---|---|
STILL_CAPTURE_MODE_TYPE_TIMELAPSE |
Images are captured with a time interval |
0 |
STILL_CAPTURE_MODE_TYPE_GPS_POSITION |
Images are captured with a distance interval |
1 |