Embedded Video Metadata#
On Parrot drones, both the streamed and the recorded video embed metadata that are publicly accessible, allowing advanced processing from aerial videos.
Two types of metadata are available: frame metadata (timed) and session metadata (untimed).
Frame metadata#
Frame metadata, also called timed metadata, are data that vary across time, and are synchronized with the video frames. The purpose is to allow an easy access to image and flight data for users, by multiplexing the timed data with the recorded video in MP4 files and RTP streams.
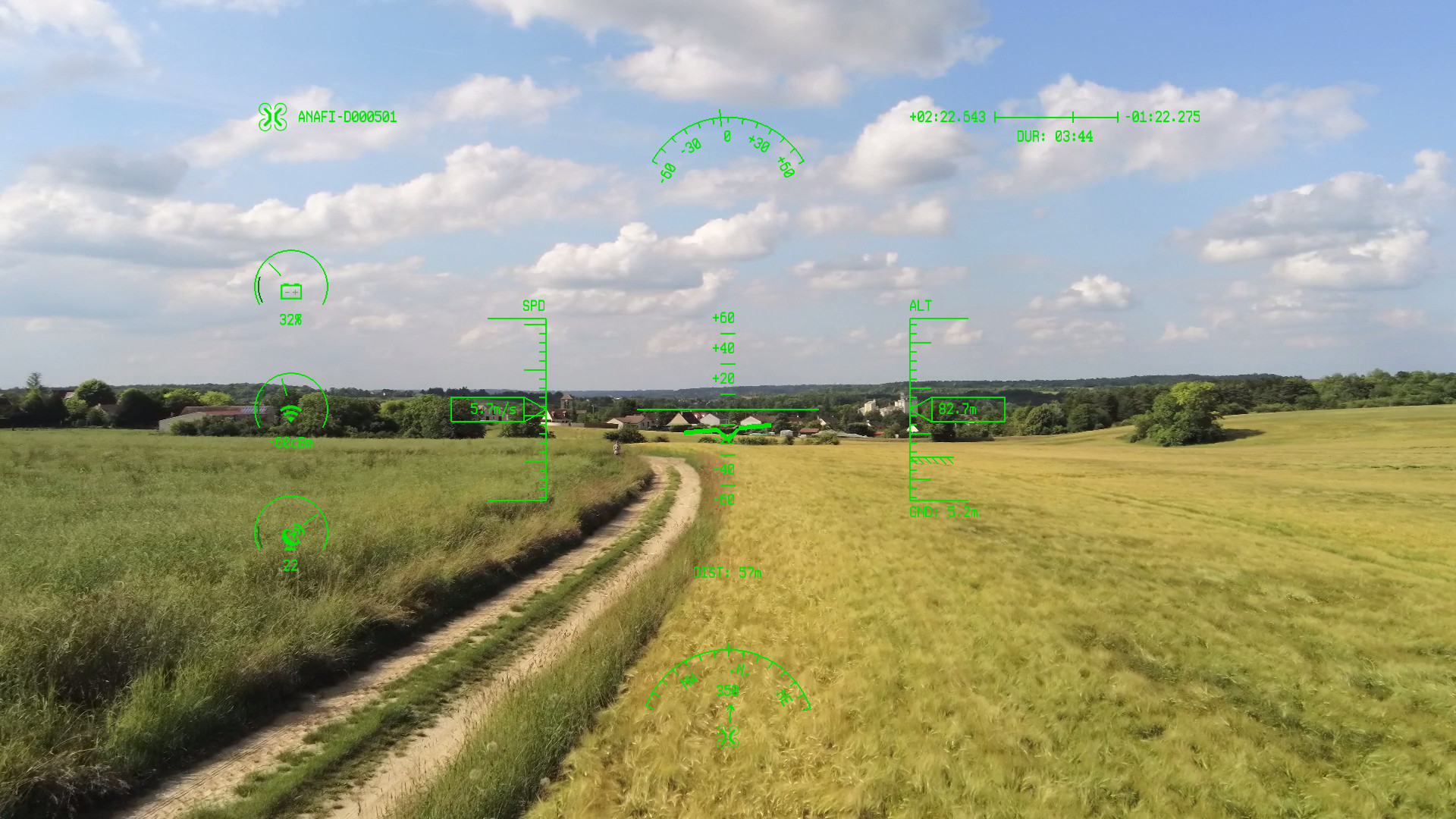
The available data include flight telemetry (drone location, speed, attitude, etc.), picture information (frame orientation, field-of-view, exposure time, etc.) and general drone information (radio signal strength, battery level, etc.).
Possible use cases include overlaying flight data on videos (HUD), computer
vision algorithms or augmented reality applications.
Below is an example of a HUD displayed by the pdraw program using the
--hud 0 command-line option:
Note
The v1 format has been used since Bebop / Bebop 2 firmware 3.2 and is not used in firmware 4.0 and later.
The v2 format is used since Bebop / Bebop 2 firmware 4.0, Disco firmware 1.1, Bebop-Pro Thermal and Bluegrass.
The v3 format is used on the Anafi range (Anafi, Anafi Thermal and Anafi USA).
The proto format is used on Anafi Ai.
Starting with Anafi Ai, the frame metadata use the protobuf (Google’s Protocol Buffers) mecanism for serializing the data.
More information about the metadata binary format can be found in the frame metadata binary format annex.
Integration in the MP4 file#
The MP4 specification (MPEG-4 part 12: ISO base media file format, ISO/IEC 14496-12) allows timed metadata to be embedded in a dedicated track. Here are the specification of the embedded metadata track:
track header (
tkhd) : volume = 0, width = 0, height = 0track reference (
tref) : reference_type =cdsc, track_IDs[0] = video track IDhandler reference (
hdlr) : handler_type =metanull media header
nmhdsample description (
stsd) : type TextMetaDataSampleEntry, mime_format =application/octet-stream;type=<mime_type>, where<mime_type>is:com.parrot.videometadata1for the v1 formatcom.parrot.videometadata2for the v2 formatcom.parrot.videometadata3for the v3 formatcom.parrot.videometadataprotofor the proto format
The MIME type in the sample description box is enough to describe the metadata format. Further modification to the data format will require an update of the MIME type.
The frame capture timestamp must be included in the timed data to allow offline synchronization even if the metadata has been extracted from the MP4 file. In all metadata formats, the timestamp is available in the metadata structure (or in an extension structure for v2 and v3 formats). Similarly, the video bitstream must contain frame capture timestamps; for this purpose, the timestamps are included in H.264 picture timing SEI or H.265 time code SEI.
Integration in the RTP stream#
The RTP protocol (RFC 3550) allows RTP packet header extensions of a custom
format when the X bit is set (bit 3).
0 1 2 3
0 1 2 3 4 5 6 7 8 9 0 1 2 3 4 5 6 7 8 9 0 1 2 3 4 5 6 7 8 9 0 1
+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+
|V=2|P|X| CC |M| PT | sequence number |
+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+
| timestamp |
+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+
| synchronization source (SSRC) identifier |
+=+=+=+=+=+=+=+=+=+=+=+=+=+=+=+=+=+=+=+=+=+=+=+=+=+=+=+=+=+=+=+=+
| contributing source (CSRC) identifiers |
| .... |
+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+
Consequently, the frame metadata are embedded in the RTP stream as packet header
extensions with a known 16 bits defined by profile field value.
0 1 2 3
0 1 2 3 4 5 6 7 8 9 0 1 2 3 4 5 6 7 8 9 0 1 2 3 4 5 6 7 8 9 0 1
+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+
| defined by profile | length |
+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+-+
| header extension |
| .... |
The defined by profile field is used to recognize the format and version of
the data and can have the following values:
0x5031, i.e.
P1in ASCII, for the v1 format0x5032, i.e.
P2in ASCII, for the v2 format0x5033, i.e.
P3in ASCII, for the v3 format0x5062, i.e.
Pbin ASCII, for the proto format
Any further modification to the data format will require to update the
defined by profile field value.
To minimize the network overhead, the timed metadata is not sent in the header extension of every packet of a frame, but in a limited number of packets. For the proto format the metadata can be split in the first packets of a frame. For v1, v2 and v3 formats the metadata is sent in the first packet. Optionally the metadata can be duplicated in other packets for packet loss resilience.
It is not necessary to embed the frame capture timestamps in the metadata as the RTP headers are inseparable from the H.264 payload, and the capture timestamps are included in the video bitstream in H.264 picture timing SEI.
Accessing the frame metadata with libvideo-metadata#
The recommended way to access the frame metadata is by using Parrot’s libvideo-metadata (vmeta for short). This C library handles serializing and deserializing the metadata, presenting friendly C structures containing the metadata in the API.
One way to get vmeta_frame structures from a record or a stream is to use a
video sink in PDrAW. Each frame output through the sink (either YUV or
H.264) has a vmeta_frame structure if frame metadata were found. For a simple
example of video sink usage, see libpdraw-vsink and the pdraw-vsink-test
program.
Still using PDrAW, vmeta_frame structures are also output in the external
texture loading and overlay rendering callback functions.
Another way is to use libvideo-metadata’s executable tool named vmeta-extract. This tool takes as input an MP4 file or a *.pcap capture and outputs JSON and/or KML files.
If none of these options are suitable, libvideo-metadata’s API can be used to deserialize data from a record or stream by using the vmeta_frame_read() function. In the case of a record, the input to this function is an MP4 sample from the metadata track. In the case of a stream, the input to this function is an RTP packet header extension.
Session metadata#
Session metadata, also called untimed metadata, are data that do not vary across time i.e. that are constant during the lifetime of the video. The purpose is to give information about the device that produced the video.
The available data include general drone information (model name, serial number, software version, friendly name, etc.), flight context (media date, geotag, etc.) and time-invariant picture information (eg. picture field-of-view for drone models without a zoom feature).
Integration in the MP4 file#
Session metadata are included in MP4 files as tags. Two methods of inclusion exist:
in a
moov/udta/meta/ilstbox with 4 characters keys (udtamethod, originally an iTunes feature)in a
moov/meta/ilstbox with full keys (metamethod, see the Apple’s QuickTime File Format Specification)
Note
The availability of session metadata in records depends on the products and firmware versions:
Bebop / Bebop 2 < 4.1 or Disco < 1.4: no session metadata available
Bebop / Bebop 2 >= 4.1, Disco >= 1.4, Bebop-Pro Thermal, Bluegrass, Anafi range and Anafi Ai: session metadata with both the
udtaand themetamethods
Integration in the RTP stream#
Session metadata are included in streams according to two methods of inclusion:
in SDES items in RTCP compound packets with the sender reports sent periodically (see RFC 3550)
in SDP items (RFC 4566) in replies to RTSP
DESCRIBEmethods at the stream initialization when RTSP (RFC 2326) is supported (on the Anafi range and Anafi Ai)
Note
The availability of session metadata in streams depends on the products and firmware versions:
Bebop / Bebop 2 < 4.1 or Disco < 1.4: no untimed metadata available
Bebop / Bebop 2 >= 4.1, Disco >= 1.4, Bebop-Pro Thermal, Bluegrass and Anafi range < 1.5: session metadata in RTCP SDES items
Anafi range >= 1.5 and Anafi Ai: session metadata with both RTCP SDES items and SDP items methods
In RTCP SDES items the CNAME item is mandatory and is sent in every compound RTCP packet along with a sender report. Other items are not sent in every compound RTCP packet but periodically, for example every 10 seconds.
Some of these elements may not be present in a stream. For example, the take-off
position may be unknown. Some of these values may be sent late or change within
a streaming session. For example, the streaming session will likely be started
before the take-off, therefore the take-off location will be known and sent
later in RTCP SDES items. Likewise, multiple take-offs can occur in a same
streaming session, a new take off location value can then occur in the stream
RTCP SDES items. SDP items however are only sent in the reply to a DESCRIBE
RTSP method at stream initialization, so the values are not updated later in the
streaming session.
Accessing the session metadata with libvideo-metadata#
The recommended way to access the session metadata is by using Parrot’s libvideo-metadata (vmeta for short). This C library handles serializing and deserializing the metadata, presenting a friendly C structure containing the metadata in the API.
One way to get the vmeta_session structure from a record or a stream in
PDrAW is to use the pdraw_media_info structure in media_added /
media_removed demuxer callback functions (or onMediaAdded /
onMediaRemoved demuxer listener functions).
Still using PDrAW, the vmeta_session structure is also output in the
external texture loading and overlay rendering callback functions in the
pdraw_media_info structure.
Another way is to use libvideo-metadata’s executable tool named vmeta-extract. This tool takes as input an MP4 file or a *.pcap capture and writes the session metadata found to the standard output.
If none of these options are suitable, libvideo-metadata’s API can be used to
deserialize data from a record or stream by using the
vmeta_session_recording_read(), vmeta_session_streaming_sdes_read() and
vmeta_session_streaming_sdp_read() functions. In the case of a record, the
input to the function is key/value pairs from the metadata tags in the MP4 file.
In the case of a stream, the input to this function is either SDP items from
the reply to an RTSP DESCRIBE, or SDES items from RTCP packets.
Session metadata definition#
The following table lists the available session metadata for various drone models.
Any additional metadata present and not supported by the application must be ignored. Some of these elements may not be present in a file. For example, the take-off position may be unknown.
Legend:
BB: Bebop range (Bebop, Bebop 2, Bebop-Pro Thermal)D: DiscoBG: BluegrassANA: Anafi range (Anafi, Anafi Thermal, Anafi USA)ANA-AI: Anafi Ai
Metadata |
Method |
Example |
BB |
D |
BG |
ANA |
ANA-AI |
|---|---|---|---|---|---|---|---|
Friendly name |
Record: ‘udta’ with key ‘©ART’ (artist) |
“ANAFI-G059745” |
>= 4.1.0 |
>= 1.4.0 |
y |
y |
y |
Record: ‘meta’ with key “com.apple.quicktime.artist” |
>= 4.1.0 |
>= 1.4.0 |
y |
y |
y |
||
Stream: RTCP SDES item ‘NAME’ (id=2) |
>= 4.1.0 |
>= 1.4.0 |
y |
y |
y |
||
Stream: SDP session information (‘i=’) |
- |
- |
- |
>= 1.5.0 |
y |
||
Product maker |
Record: ‘udta’ with key ‘©mak’ |
“Parrot” |
>= 4.1.0 |
>= 1.4.0 |
y |
y |
y |
Record: ‘meta’ with key “com.apple.quicktime.make” |
>= 4.1.0 |
>= 1.4.0 |
y |
y |
y |
||
Stream: private SDES item (‘PRIV’, id=8) with prefix “maker” |
>= 4.1.0 |
>= 1.4.0 |
y |
y |
y |
||
Stream: SDP session-level attribute “X-com-parrot-maker” |
- |
- |
- |
>= 1.5.0 |
y |
||
Product model |
Record: ‘udta’ with key ‘©mod’ |
“Anafi” |
>= 4.1.0 |
>= 1.4.0 |
y |
y |
y |
Record: ‘meta’ with key “com.apple.quicktime.model” |
>= 4.1.0 |
>= 1.4.0 |
y |
y |
y |
||
Stream: private SDES item (‘PRIV’, id=8) with prefix “model” |
>= 4.1.0 |
>= 1.4.0 |
y |
y |
y |
||
Stream: SDP session-level attribute “X-com-parrot-model” |
- |
- |
- |
>= 1.5.0 |
y |
||
Product model ID |
Record: ‘meta’ with key “com.parrot.model.id” |
“0914” |
>= 4.1.0 |
>= 1.4.0 |
y |
y |
y |
Stream: private SDES item (‘PRIV’, id=8) with prefix “model_id” |
>= 4.1.0 |
>= 1.4.0 |
y |
y |
y |
||
Stream: SDP session-level attribute “X-com-parrot-model-id” |
- |
- |
- |
>= 1.5.0 |
y |
||
Serial number |
Record: ‘udta’ with key ‘©too’ |
“PI040416BA8G059745” |
>= 4.1.0 |
>= 1.4.0 |
y |
y |
y |
Record: ‘meta’ with key “com.parrot.serial” |
>= 4.1.0 |
>= 1.4.0 |
y |
y |
y |
||
Stream: RTCP SDES item ‘CNAME’ (id=1) |
>= 4.1.0 |
>= 1.4.0 |
y |
y |
y |
||
Stream: SDP session-level attribute “X-com-parrot-serial” |
- |
- |
- |
>= 1.5.0 |
y |
||
Software version |
Record: ‘udta’ with key ‘©swr’ |
“1.3.0” |
>= 4.1.0 |
>= 1.4.0 |
y |
y |
y |
Record: ‘meta’ with key “com.apple.quicktime.software” |
>= 4.1.0 |
>= 1.4.0 |
y |
y |
y |
||
Stream: RTCP SDES item ‘TOOL’ (id=6) |
>= 4.1.0 |
>= 1.4.0 |
y |
y |
y |
||
Stream: SDP session-level attribute “tool” |
- |
- |
- |
>= 1.5.0 |
y |
||
Software build ID |
Record: ‘meta’ with key “com.parrot.build.id” |
“anafi-4k-1.3.0” |
>= 4.1.0 |
>= 1.4.0 |
y |
y |
y |
Stream: private SDES item (‘PRIV’, id=8) with prefix “build_id” |
>= 4.1.0 |
>= 1.4.0 |
y |
y |
y |
||
Stream: SDP session-level attribute “X-com-parrot-build-id” |
- |
- |
- |
>= 1.5.0 |
y |
||
Video title |
Record: ‘udta’ with key ‘©nam’ |
“Sat, 06 Oct 2018 18:12:52 +0200” |
>= 4.1.0 |
>= 1.4.0 |
y |
y |
y |
Record: ‘meta’ with key “com.apple.quicktime.title” |
>= 4.1.0 |
>= 1.4.0 |
y |
y |
y |
||
Stream: private SDES item (‘PRIV’, id=8) with prefix “title” |
>= 4.1.0 |
>= 1.4.0 |
y |
y |
y |
||
Stream: SDP session name (‘s=’) |
- |
- |
- |
>= 1.5.0 |
y |
||
Copyright |
Record: ‘udta’ with key ‘©cpy’ |
“Copyright (c) 2021 Parrot Drones SAS” |
- |
- |
- |
- |
y |
Record: ‘meta’ with key “com.apple.quicktime.copyright” |
- |
- |
- |
- |
y |
||
Stream: private SDES item (‘PRIV’, id=8) with prefix “copyright” |
- |
- |
- |
- |
y |
||
Stream: SDP session-level attribute “X-com-parrot-copyright” |
- |
- |
- |
- |
y |
||
Run date |
Record: ‘meta’ with key “com.parrot.run.date” |
“2018-10-06 T18:11:04+02:00” |
>= 4.1.0 |
>= 1.4.0 |
y |
y |
y |
Stream: private SDES item (‘PRIV’, id=8) with prefix “run_date” |
>= 4.1.0 |
>= 1.4.0 |
y |
y |
y |
||
Stream: SDP session-level attribute “X-com-parrot-run-date” |
- |
- |
- |
>= 1.5.0 |
y |
||
Run ID |
Record: ‘meta’ with key “com.parrot.run.id” |
“B3891A8DE0A7FD32 0D4297E5386D9BF5” |
>= 4.1.0 |
>= 1.4.0 |
y |
y |
y |
Stream: private SDES item (‘PRIV’, id=8) with prefix “run_id” |
>= 4.1.0 |
>= 1.4.0 |
y |
y |
y |
||
Stream: SDP session-level attribute “X-com-parrot-run-id” |
- |
- |
- |
>= 1.5.0 |
y |
||
Boot date |
Record: ‘meta’ with key “com.parrot.boot.date” |
“2022-04-11 T09:49:11+02:00” |
- |
- |
- |
- |
>= 7.3.0 |
Stream: private SDES item (‘PRIV’, id=8) with prefix “boot_date” |
- |
- |
- |
- |
>= 7.3.0 |
||
Stream: SDP session-level attribute “X-com-parrot-boot-date” |
- |
- |
- |
- |
>= 7.3.0 |
||
Boot ID |
Record: ‘meta’ with key “com.parrot.boot.id” |
“504F90CCA4428736 2F2E1C5EDA5860AB” |
- |
- |
- |
y |
y |
Stream: private SDES item (‘PRIV’, id=8) with prefix “boot_id” |
- |
- |
- |
y |
y |
||
Stream: SDP session-level attribute “X-com-parrot-boot-id” |
- |
- |
- |
>= 1.5.0 |
y |
||
Flight date |
Record: ‘meta’ with key “com.parrot.flight.date” |
“2022-04-11 T09:49:11+02:00” |
- |
- |
- |
- |
>= 7.3.0 |
Stream: private SDES item (‘PRIV’, id=8) with prefix “flight_date” |
- |
- |
- |
- |
>= 7.3.0 |
||
Stream: SDP session-level attribute “X-com-parrot-flight-date” |
- |
- |
- |
- |
>= 7.3.0 |
||
Flight ID |
Record: ‘meta’ with key “com.parrot.flight.id” |
“E936CE92058A4A27 9676FFC33B388BCC” |
- |
- |
- |
- |
- |
Stream: private SDES item (‘PRIV’, id=8) with prefix “flight_id” |
- |
- |
- |
- |
- |
||
Stream: SDP session-level attribute “X-com-parrot-flight-id” |
- |
- |
- |
- |
- |
||
Custom ID |
Record: ‘meta’ with key “com.parrot.custom.id” |
“7A996A68DF7A436C A701B6E2EC2AD3B9” |
- |
- |
- |
- |
y |
Stream: private SDES item (‘PRIV’, id=8) with prefix “custom_id” |
- |
- |
- |
- |
y |
||
Stream: SDP session-level attribute “X-com-parrot-custom-id” |
- |
- |
- |
- |
y |
||
Media date |
Record: ‘udta’ with key ‘©day’ |
“2018-10-06 T18:12:52+02:00” |
>= 4.1.0 |
>= 1.4.0 |
y |
y |
y |
Record: ‘meta’ with key “com.apple.quicktime .creationdate” |
>= 4.1.0 |
>= 1.4.0 |
y |
y |
y |
||
Stream: private SDES item (‘PRIV’, id=8) with prefix “media_date” |
- |
- |
- |
y (replay) |
y (replay) |
||
Stream: SDP session-level attribute “X-com-parrot-media-date” |
- |
- |
- |
>= 1.5.0 (replay) |
y (replay) |
||
Geotag / take-off location |
Record: ‘udta’ with key ‘©xyz’ in the ‘moov/udta’ box not the ‘moov/udta/meta/ilst’ box for Android compatibility; ISO 6709 Annex H string or latitude and longitude only (deprecated) The altitude is with reference to the EGM96 geoid (AMSL) |
“+16.42850589 -061.53569552+6.80/” or “+16.4285-061.5357/” |
>= 4.1.0 |
>= 1.4.0 |
y |
y |
y |
Record: ‘meta’ with key “com.apple.quicktime .location.ISO6709”; ISO 6709 Annex H string |
“+16.42850589 -061.53569552+6.80/” |
>= 4.1.0 |
>= 1.4.0 |
y |
y |
y |
|
Stream: RTCP SDES item ‘LOC’ (id=5); ISO 6709 Annex H string |
>= 4.1.0 |
>= 1.4.0 |
y |
y |
y |
||
Stream: SDP session-level attribute “X-com-parrot-takeoff-loc”; ISO 6709 Annex H string |
- |
- |
- |
>= 1.5.0 |
y |
||
Default media |
Stream: SDP session or media-level attribute “X-com-parrot-default-media” |
“1” if present |
- |
- |
- |
- |
>= 7.3.0 |
Camera type |
Record: ‘meta’ with key “com.parrot.camera.type” |
“front”, “front-stereo-left”, “front-stereo-right”, “vertical” or “disparity” |
- |
- |
- |
- |
y |
Stream: private SDES item (‘PRIV’, id=8) with prefix “camera_type” |
- |
- |
- |
- |
y |
||
Stream: SDP session or media-level attribute “X-com-parrot-camera-type” |
- |
- |
- |
- |
y |
||
Camera serial number |
Record: ‘meta’ with key “com.parrot.camera.serial” |
“PI020832P10K002397” |
- |
- |
- |
- |
>= 7.4.0 |
Stream: private SDES item (‘PRIV’, id=8) with prefix “camera_serial_number” |
- |
- |
- |
- |
>= 7.4.0 |
||
Stream: SDP session-level attribute “X-com-parrot-camera-serial” |
- |
- |
- |
- |
>= 7.4.0 |
||
Video mode |
Record: ‘meta’ with key “com.parrot.video.mode” |
“Standard”, “Hyperlapse” or “SlowMotion” |
- |
- |
- |
>= 1.6.0 |
y |
Stream: private SDES item (‘PRIV’, id=8) with prefix “video_mode” |
- |
- |
- |
>= 1.6.0 (replay) |
y (replay) |
||
Stream: SDP session or media-level attribute “X-com-parrot-video-mode” |
- |
- |
- |
>= 1.6.0 (replay) |
y (replay) |
||
Video stop reason |
Record: ‘meta’ with key “com.parrot.video.stop.reason” |
“reconfiguration”, “poor-storage-perf”, “storage-full”, “recovery”, “end-of-stream” or “shutdown” |
- |
- |
- |
- |
y |
Stream: private SDES item (‘PRIV’, id=8) with prefix “video_stop_reason” |
- |
- |
- |
- |
y (replay) |
||
Stream: SDP session or media-level attribute “X-com-parrot-video-stop-reason” |
- |
- |
- |
- |
y (replay) |
||
Dynamic range |
Record: ‘meta’ with key “com.parrot.dynamic.range” |
“sdr”, “hdr8” or “hdr10” |
- |
- |
- |
- |
y |
Stream: private SDES item (‘PRIV’, id=8) with prefix “dynamic_range” |
- |
- |
- |
- |
y (replay) |
||
Stream: SDP session or media-level attribute “X-com-parrot-dynamic-range” |
- |
- |
- |
- |
y (replay) |
||
Tone mapping |
Record: ‘meta’ with key “com.parrot.tone.mapping” |
“standard” or “p-log”, |
- |
- |
- |
- |
y |
Stream: private SDES item (‘PRIV’, id=8) with prefix “tone_mapping” |
- |
- |
- |
- |
y (replay) |
||
Stream: SDP session or media-level attribute “X-com-parrot-tone-mapping” |
- |
- |
- |
- |
y (replay) |
||
Picture HFOV / VFOV VFOV |
Record: ‘meta’ with key “com.parrot.picture.fov” or “com.parrot.picture.hfov” (deprecated) and “com.parrot.picture.vfov” (deprecated) |
“78.00,49.00” or “78.00” and “49.00” (deprecated) |
>= 4.1.0 |
>= 1.4.0 |
y |
- |
- |
Stream: private SDES item (‘PRIV’, id=8) with prefix “picture_fov” or “picture_hfov” (deprecated) and “picture_vfov” (deprecated) |
>= 4.1.0 |
>= 1.4.0 |
y |
- |
- |
||
Stream: SDP session or media-level attribute “X-com-parrot-picture-fov” |
- |
- |
- |
- |
- |
||
Thermal camera metadata version |
Record: ‘meta’ with key “com.parrot.thermal .metaversion” |
“1” |
y (thermal) |
- |
- |
y (thermal) |
- |
Stream: private SDES item (‘PRIV’, id=8) with prefix “thermal_metaversion” |
y (thermal) |
- |
- |
y (thermal) |
- |
||
Stream: SDP session or media- level attribute “X-com-parrot- thermal-metaversion” |
- |
- |
- |
y (thermal) |
- |
||
Thermal camera serial number |
Record: ‘meta’ with key “com.parrot.thermal .camserial” |
“F07H7H00242” |
y (thermal) |
- |
- |
- |
- |
Stream: private SDES item (‘PRIV’, id=8) with prefix “thermal_camserial” |
y (thermal) |
- |
- |
- |
- |
||
Stream: SDP session or media- level attribute “X-com-parrot- thermal-camserial” |
- |
- |
- |
- |
- |
||
Thermal camera alignment data |
Record: ‘meta’ with key “com.parrot.thermal .alignment” |
“-0.870,0.318, 88.848” |
y (thermal) |
- |
- |
y (thermal) |
- |
Stream: private SDES item (‘PRIV’, id=8) with prefix “thermal_alignment” |
y (thermal) |
- |
- |
y (thermal) |
- |
||
Stream: SDP session or media- level attribute “X-com-parrot- thermal-alignment” |
- |
- |
- |
y (thermal) |
- |
||
Thermal camera temperature conversion parameters |
Record: ‘meta’ with key “com.parrot.thermal.conv.low” for low-gain and “com.parrot .thermal.conv.high” for high-gain |
“1390082.947851, 1449.5,1.0,1476.356, 0.8,25.0,22.0,0.98” |
y (thermal) |
- |
- |
- |
- |
Stream: private SDES item (‘PRIV’, id=8) with prefix “thermal_conv_low” for low-gain and “thermal_conv_high” for high-gain |
y (thermal) |
- |
- |
- |
- |
||
Stream: SDP session or media- level attribute “X-com-parrot- thermal-conv-low” for low-gain and “X-com-parrot-thermal- conv-high” for high-gain |
- |
- |
- |
- |
- |
||
Thermal camera scale factor |
Record: ‘meta’ with key “com.parrot.thermal .scalefactor” |
“1.035156” |
y (thermal) |
- |
- |
y (thermal) |
- |
Stream: private SDES item (‘PRIV’, id=8) with prefix “thermal_scalefactor” |
y (thermal) |
- |
- |
y (thermal) |
- |
||
Stream: SDP session or media- level attribute “X-com-parrot- thermal-scalefactor” |
- |
- |
- |
y (thermal) |
- |
Annex: frame metadata binary format#
Version 1 binary format (v1)#
The format below is the binary format as found in MP4 metadata track samples and RTP header extensions. This format is listed for informative purposes. The recommended way of accessing the metadata is to use libvideo-metadata.
Note
Version 1 of the metadata format is now deprecated and should not be used.
The version 1 format for recording has been used since Bebop / Bebop 2 firmware 3.2 and is not used in firmware 4.0 and later.
The version 1 format for streaming has been used since Bebop / Bebop 2 firmware 3.3 and is not used in firmware 4.0 and later.
Floating-point values are converted to fixed-point (for example Q4.12 means 16 bits total, 4 bits for the integer part and 12 bits for the decimal part) to optimize the compacity and ease the serialization. All data are serialized in network order.
In the case of streaming, the value 0x5031 (P1 in ASCII) is used as
identifier (defined by profile RTP header extension field).
Not all values are sent at each frame (GPS coordinates for example).
2 data structures are defined: a basic structure and an extended structure;
these structures are differentiated using the header extension size
(length field). The choice between basic or extended structure is made
according to the following rule:
extended structure (56 bytes): 5 Hz
basic structure (28 bytes): the rest of the time
In the case of recording, no ASCII identifier exists. All values are available with each frame and the data always has the same size (60 bytes).
#define GPS_ALTITUDE_MASK (0xFFFFFF00) /* GPS altitude mask */
#define GPS_ALTITUDE_SHIFT (8) /* GPS altitude shift */
#define GPS_SV_COUNT_MASK (0x000000FF) /* GPS SV count mask */
#define GPS_SV_COUNT_SHIFT (0) /* GPS SV count shift */
#define FLYING_STATE_MASK (0x7F) /* Flying state mask */
#define FLYING_STATE_SHIFT (0) /* Flying state shift */
#define BINNING_MASK (0x80) /* Binning mask */
#define BINNING_SHIFT (7) /* Binning shift */
#define PILOTING_MODE_MASK (0x7F) /* Piloting mode mask */
#define PILOTING_MODE_SHIFT (0) /* Piloting mode shift */
#define ANIMATION_MASK (0x80) /* Animation mask */
#define ANIMATION_SHIFT (7) /* Animation shift */
enum flying_state
{
FLYING_STATE_LANDED = 0, /* Landed state */
FLYING_STATE_TAKINGOFF, /* Taking off state */
FLYING_STATE_HOVERING, /* Hovering state */
FLYING_STATE_FLYING, /* Flying state */
FLYING_STATE_LANDING, /* Landing state */
FLYING_STATE_EMERGENCY, /* Emergency state */
};
enum piloting_mode
{
PILOTING_MODE_MANUAL = 0, /* Manual piloting by the user */
PILOTING_MODE_RETURN_HOME, /* Automatic return home in progress */
PILOTING_MODE_FLIGHT_PLAN, /* Automatic flight plan in progress */
PILOTING_MODE_FOLLOW_ME, /* Automatic "follow-me" in progress */
};
struct metadata_v1_recording
{
uint32_t frame_timestamp_h; /* Frame timestamp (µs, monotonic), high 32 bits */
uint32_t frame_timestamp_l; /* Frame timestamp (µs, monotonic), low 32 bits */
int16_t drone_yaw; /* Drone yaw/psi (rad), Q4.12 */
int16_t drone_pitch; /* Drone pitch/theta (rad), Q4.12 */
int16_t drone_roll; /* Drone roll/phi (rad), Q4.12 */
int16_t camera_pan; /* Camera pan (rad), Q4.12 */
int16_t camera_tilt; /* Camera tilt (rad), Q4.12 */
int16_t frame_w; /* Frame view quaternion W, Q4.12 */
int16_t frame_x; /* Frame view quaternion X, Q4.12 */
int16_t frame_y; /* Frame view quaternion Y, Q4.12 */
int16_t frame_z; /* Frame view quaternion Z, Q4.12 */
int16_t exposure_time; /* Frame exposure time (ms), Q8.8 */
int16_t gain; /* Frame ISO gain */
int8_t wifi_rssi; /* Wifi RSSI (dBm) */
uint8_t battery_percentage; /* Battery charge percentage */
int32_t gps_latitude; /* GPS latitude (deg), Q12.20 */
int32_t gps_longitude; /* GPS longitude (deg), Q12.20 */
int32_t gps_altitude_and_sv; /* Bits 31..8 = GPS altitude AMSL/EGM96 (m) Q16.8, bits 7..0 = SV count */
int32_t altitude; /* Altitude AMSL/EGM96 relative to take-off (m), Q16.16 */
uint32_t distance_from_home; /* Distance from home (m), Q16.16 */
int16_t x_speed; /* X speed (m/s), Q8.8 */
int16_t y_speed; /* Y speed (m/s), Q8.8 */
int16_t z_speed; /* Z speed (m/s), Q8.8 */
uint8_t state; /* Bit 7 = binning, bits 6..0 = flyingState */
uint8_t mode; /* Bit 7 = animation, bits 6..0 = pilotingMode */
};
struct metadata_v1_streaming_basic
{
uint16_t specific; /* Identifier = 0x5031 */
uint16_t length; /* Size in 32 bits words = 6 */
int16_t drone_yaw; /* Drone yaw/psi (rad), Q4.12 */
int16_t drone_pitch; /* Drone pitch/theta (rad), Q4.12 */
int16_t drone_roll; /* Drone roll/phi (rad), Q4.12 */
int16_t camera_pan; /* Camera pan (rad), Q4.12 */
int16_t camera_tilt; /* Camera tilt (rad), Q4.12 */
int16_t frame_w; /* Frame view quaternion W, Q4.12 */
int16_t frame_x; /* Frame view quaternion X, Q4.12 */
int16_t frame_y; /* Frame view quaternion Y, Q4.12 */
int16_t frame_z; /* Frame view quaternion Z, Q4.12 */
int16_t exposure_time; /* Frame exposure time (ms), Q8.8 */
int16_t gain; /* Frame ISO gain */
int8_t wifi_rssi; /* Wifi RSSI (dBm) */
uint8_t battery_percentage; /* Battery charge percentage */
};
struct metadata_v1_streaming_extended
{
uint16_t specific; /* Identifier = 0x5031 */
uint16_t length; /* Size in 32 bits words = 13 */
int16_t drone_yaw; /* Drone yaw/psi (rad), Q4.12 */
int16_t drone_pitch; /* Drone pitch/theta (rad), Q4.12 */
int16_t drone_roll; /* Drone roll/phi (rad), Q4.12 */
int16_t camera_pan; /* Camera pan (rad), Q4.12 */
int16_t camera_tilt; /* Camera tilt (rad), Q4.12 */
int16_t frame_w; /* Frame view quaternion W, Q4.12 */
int16_t frame_x; /* Frame view quaternion X, Q4.12 */
int16_t frame_y; /* Frame view quaternion Y, Q4.12 */
int16_t frame_z; /* Frame view quaternion Z, Q4.12 */
int16_t exposure_time; /* Frame exposure time (ms), Q8.8 */
int16_t gain; /* Frame ISO gain */
int8_t wifi_rssi; /* Wifi RSSI (dBm) */
uint8_t battery_percentage; /* Battery charge percentage */
int32_t gps_latitude; /* GPS latitude (deg), Q12.20 */
int32_t gps_longitude; /* GPS longitude (deg), Q12.20 */
int32_t gps_altitude_and_sv; /* Bits 31..8 = GPS altitude AMSL/EGM96 (m) Q16.8, bits 7..0 = SV count */
int32_t altitude; /* Altitude AMSL/EGM96 relative to take-off (m), Q16.16 */
uint32_t distance_from_home; /* Distance from home (m), Q16.16 */
int16_t x_speed; /* X speed (m/s), Q8.8 */
int16_t y_speed; /* Y speed (m/s), Q8.8 */
int16_t z_speed; /* Z speed (m/s), Q8.8 */
uint8_t state; /* Bit 7 = binning, bits 6..0 = flyingState */
uint8_t mode; /* Bit 7 = animation, bits 6..0 = pilotingMode */
};
Version 2 and version 3 binary formats (v2 and v3)#
The formats below are the binary formats as found in MP4 metadata track samples and RTP header extensions. These formats are listed for informative purposes. The recommended way of accessing the metadata is to use libvideo-metadata.
Note
The version 2 format for both recording and streaming is used since Bebop / Bebop 2 firmware 4.0, Disco firmware 1.1, Bebop-Pro Thermal and Bluegrass.
The version 3 format for both recording and streaming is used on the Anafi range (Anafi, Anafi Thermal and Anafi USA).
Floating-point values are converted to fixed-point (for example Q4.12 means 16 bits total, 4 bits for the integer part and 12 bits for the decimal part) to optimize the compacity and ease the serialization. All data are serialized in network order.
The v2 and v3 structures are used for both recording and streaming metadata.
The identifier is 0x5032 (P2 in ASCII) for v2 format and 0x5033 (P3
in ASCII) for v3 format.
The version 2 and 3 base structures are compatible with future extensions using
extension structures. The base structure length field gives the global size
of the structure (base + extensions, in 32 bits words, excluding the id and
length fields). If the base structure is followed by extensions, each
extension starts with an extension identifier ext_id (to know the extension
format) and an extension size ext_length in 32 bits words, excluding the
ext_id and ext_length fields).
An application not compatible with an extension type shall skip the extension
(reading the ext_length field) and read the next extension if other
extensions are present. Extensions are required to be 4-bytes aligned;
therefore, extension structures sizes are multiples of 4.
Only one extension of each type may be present in a metadata structure. A frame
timestamp extension is defined with ext_id = 0x4531 (E1 in ASCII). For
recording metadata, this extension should always be present. A follow-me
extension is defined with ext_id = 0x4532 (E2 in ASCII) and can be
available only with a version 2 base format, in both streams and records.
An automation extension is defined with ext_id = 0x4533 (E3 in ASCII)
and can be available only with a version 3 base format, in both streams and
records.
#define ALTITUDE_MASK (0xFFFFFF00) /* Altitude mask */
#define ALTITUDE_SHIFT (8) /* Altitude shift */
#define GPS_SV_COUNT_MASK (0x000000FF) /* GPS SV count mask */
#define GPS_SV_COUNT_SHIFT (0) /* GPS SV count shift */
#define FLYING_STATE_MASK (0x7F) /* Flying state mask */
#define FLYING_STATE_SHIFT (0) /* Flying state shift */
#define BINNING_MASK (0x80) /* Binning mask */
#define BINNING_SHIFT (7) /* Binning shift */
#define PILOTING_MODE_MASK (0x7F) /* Piloting mode mask */
#define PILOTING_MODE_SHIFT (0) /* Piloting mode shift */
#define ANIMATION_MASK (0x80) /* Animation mask */
#define ANIMATION_SHIFT (7) /* Animation shift */
enum flying_state
{
FLYING_STATE_LANDED = 0, /* Landed state */
FLYING_STATE_TAKINGOFF, /* Taking off state */
FLYING_STATE_HOVERING, /* Hovering state */
FLYING_STATE_FLYING, /* Flying state */
FLYING_STATE_LANDING, /* Landing state */
FLYING_STATE_EMERGENCY, /* Emergency state */
FLYING_STATE_USER_TAKEOFF, /* User take off state */
FLYING_STATE_MOTOR_RAMPING, /* Motor ramping state */
FLYING_STATE_EMERGENCY_LANDING, /* Emergency landing state */
};
enum piloting_mode
{
PILOTING_MODE_MANUAL = 0, /* Manual piloting by the user */
PILOTING_MODE_RETURN_HOME, /* Automatic return home in progress */
PILOTING_MODE_FLIGHT_PLAN, /* Automatic flight plan in progress */
PILOTING_MODE_TRACKING, /* Automatic tracking in progress */
PILOTING_MODE_FOLLOW_ME = PILOTING_MODE_TRACKING,
PILOTING_MODE_MAGIC_CARPET, /* Automatic "magic carpet" test in progress */
PILOTING_MODE_MOVE_TO, /* Automatic "move to" in progress */
};
enum followme_anim
{
FOLLOW_ME_ANIMATION_NONE = 0, /* No animation in progress */
FOLLOW_ME_ANIMATION_ORBIT, /* Follow-me orbit animation in progress */
FOLLOW_ME_ANIMATION_BOOMERANG, /* Follow-me boomerang animation in progress */
FOLLOW_ME_ANIMATION_PARABOLA, /* Follow-me parabola animation in progress */
FOLLOW_ME_ANIMATION_ZENITH, /* Follow-me zenith animation in progress */
};
enum automation_anim
{
AUTOMATION_ANIMATION_NONE = 0, /* No animation in progress */
AUTOMATION_ANIMATION_ORBIT, /* Orbit animation in progress */
AUTOMATION_ANIMATION_BOOMERANG, /* Boomerang animation in progress */
AUTOMATION_ANIMATION_PARABOLA, /* Parabola animation in progress */
AUTOMATION_ANIMATION_DOLLY_SLIDE, /* Dolly slide animation in progress */
AUTOMATION_ANIMATION_DOLLY_ZOOM, /* Dolly zoom animation in progress */
AUTOMATION_ANIMATION_REVEAL_VERT, /* Vertical reveal animation in progress */
AUTOMATION_ANIMATION_REVEAL_HORZ, /* Horizontal reveal animation in progress */
AUTOMATION_ANIMATION_PANORAMA_HORZ, /* Horizontal panorama animation in progress */
AUTOMATION_ANIMATION_CANDLE, /* Candle animation in progress */
AUTOMATION_ANIMATION_FLIP_FRONT, /* Front filp animation in progress */
AUTOMATION_ANIMATION_FLIP_BACK, /* Back flip animation in progress */
AUTOMATION_ANIMATION_FLIP_LEFT, /* Left flip animation in progress */
AUTOMATION_ANIMATION_FLIP_RIGHT, /* Right flip animation in progress */
AUTOMATION_ANIMATION_TWISTUP, /* Twist up animation in progress */
AUTOMATION_ANIMATION_POSITION_TWISTUP, /* Postion twist up animation in progress */
};
enum thermal_calib_state {
THERMAL_CALIB_STATE_DONE = 0,
THERMAL_CALIB_STATE_REQUESTED,
THERMAL_CALIB_STATE_IN_PROGRESS,
};
struct metadata_v2_base
{
uint16_t id; /* Identifier = 0x5032 */
uint16_t length; /* Structure size in 32 bits words excluding the id and length
* fields and including extensions */
int32_t ground_distance; /* Best ground distance estimation (m), Q16.16 */
int32_t latitude; /* Absolute latitude (deg), Q10.22 */
int32_t longitude; /* Absolute longitude (deg), Q10.22 */
int32_t altitude_and_sv; /* Bits 31..8 = altitude AMSL/EGM96 (m) Q16.8, bits 7..0 = GPS SV count */
int16_t north_speed; /* North speed (m/s), Q8.8 */
int16_t east_speed; /* East speed (m/s), Q8.8 */
int16_t down_speed; /* Down speed (m/s), Q8.8 */
int16_t air_speed; /* Speed relative to air (m/s), negative means no data, Q8.8 */
int16_t drone_w; /* Drone quaternion W, Q2.14 */
int16_t drone_x; /* Drone quaternion X, Q2.14 */
int16_t drone_y; /* Drone quaternion Y, Q2.14 */
int16_t drone_z; /* Drone quaternion Z, Q2.14 */
int16_t frame_w; /* Frame view quaternion W, Q2.14 */
int16_t frame_x; /* Frame view quaternion X, Q2.14 */
int16_t frame_y; /* Frame view quaternion Y, Q2.14 */
int16_t frame_z; /* Frame view quaternion Z, Q2.14 */
int16_t camera_pan; /* Camera pan (rad), Q4.12 */
int16_t camera_tilt; /* Camera tilt (rad), Q4.12 */
uint16_t exposure_time; /* Frame exposure time (ms), Q8.8 */
uint16_t gain; /* Frame ISO gain */
uint8_t state; /* Bit 7 = binning, bits 6..0 = flyingState */
uint8_t mode; /* Bit 7 = animation, bits 6..0 = pilotingMode */
int8_t wifi_rssi; /* Wifi RSSI (dBm) */
uint8_t battery_percentage; /* Battery charge percentage */
};
struct metadata_v3_base
{
uint16_t id; /* Identifier = 0x5033 */
uint16_t length; /* Structure size in 32 bits words excluding the id and length
* fields and including extensions */
int32_t ground_distance; /* Best ground distance estimation (m), Q16.16 */
int32_t latitude; /* Absolute latitude (deg), Q10.22 */
int32_t longitude; /* Absolute longitude (deg), Q10.22 */
int32_t altitude_and_sv; /* Bits 31..8 = altitude AMSL/EGM96 (m) Q16.8, bits 7..0 = GPS SV count */
int16_t north_speed; /* North speed (m/s), Q8.8 */
int16_t east_speed; /* East speed (m/s), Q8.8 */
int16_t down_speed; /* Down speed (m/s), Q8.8 */
int16_t air_speed; /* Speed relative to air (m/s), negative means no data, Q8.8 */
int16_t drone_w; /* Drone quaternion W, Q2.14 */
int16_t drone_x; /* Drone quaternion X, Q2.14 */
int16_t drone_y; /* Drone quaternion Y, Q2.14 */
int16_t drone_z; /* Drone quaternion Z, Q2.14 */
int16_t frame_base_w; /* Frame base view quaternion W (without pan/tilt), Q2.14 */
int16_t frame_base_x; /* Frame base view quaternion X (without pan/tilt), Q2.14 */
int16_t frame_base_y; /* Frame base view quaternion Y (without pan/tilt), Q2.14 */
int16_t frame_base_z; /* Frame base view quaternion Z (without pan/tilt), Q2.14 */
int16_t frame_w; /* Frame view quaternion W, Q2.14 */
int16_t frame_x; /* Frame view quaternion X, Q2.14 */
int16_t frame_y; /* Frame view quaternion Y, Q2.14 */
int16_t frame_z; /* Frame view quaternion Z, Q2.14 */
uint16_t exposure_time; /* Frame exposure time (ms), Q8.8 */
uint16_t gain; /* Frame ISO gain */
uint16_t awb_r_gain; /* White balance R/G gain, Q2.14 */
uint16_t awb_b_gain; /* White balance B/G gain, Q2.14 */
uint16_t picture_hfov; /* Picture horizontal FOV (deg), Q8.8 */
uint16_t picture_vfov; /* Picture vertical FOV (deg), Q8.8 */
uint32_t link_quality; /* Bits 31..8 = link goodput (kbit/s),
* bits 7..0 = link quality (0-5) */
int8_t wifi_rssi; /* Wifi RSSI (dBm) */
uint8_t battery_percentage; /* Battery charge percentage */
uint8_t state; /* Flying state */
uint8_t mode; /* Bit 7 = animation, bits 6..0 = pilotingMode */
};
struct metadata_ext
{
uint16_t ext_id; /* Extension structure id */
uint16_t ext_length; /* Extension structure size in 32 bits words excluding the
* ext_id and ext_size fields */
[...] /* Extension fields */
};
struct metadata_timestamp_ext
{
uint16_t ext_id; /* Extension structure id = 0x4531 */
uint16_t ext_length; /* Extension structure size in 32 bits words excluding the
* ext_id and ext_size fields */
uint32_t frame_timestamp_h; /* Frame timestamp (µs, monotonic), high 32 bits */
uint32_t frame_timestamp_l; /* Frame timestamp (µs, monotonic), low 32 bits */
};
struct metadata_followme_ext
{
uint16_t ext_id; /* Extension structure id = 0x4532 */
uint16_t ext_length; /* Extension structure size in 32 bits words excluding the
* ext_id and ext_size fields */
int32_t target_latitude; /* Target latitude (deg), Q10.22 */
int32_t target_longitude; /* Target longitude (deg), Q10.22 */
int32_t target_altitude; /* Target altitude ASL (m) Q16.16 */
uint8_t followme_mode; /* Follow-me feature bit field
* - bit 0: follow-me enabled (0 = disabled, 1 = enabled)
* - bit 1: mode (0 = look-at-me, 1 = follow-me)
* - bit 2: angle mode (0 = unlocked, 1 = locked)
* - bit 3-7: reserved for future use */
uint8_t followme_animation; /* Follow-me animation (0 means no animation in progress) */
uint8_t reserved1; /* Reserved for future use */
uint8_t reserved2; /* Reserved for future use */
uint32_t reserved3; /* Reserved for future use */
uint32_t reserved4; /* Reserved for future use */
};
struct metadata_automation_ext
{
uint16_t ext_id; /* Extension structure id = 0x4533 */
uint16_t ext_length; /* Extension structure size in 32 bits words excluding the
* ext_id and ext_size fields */
int32_t framing_target_latitude; /* Framing target latitude (deg), Q10.22 */
int32_t framing_target_longitude; /* Framing target longitude (deg), Q10.22 */
int32_t framing_target_altitude; /* Framing target altitude ASL (m) Q16.16 */
int32_t flight_destination_latitude; /* Flight destination latitude (deg), Q10.22 */
int32_t flight_destination_longitude; /* Flight destination longitude (deg), Q10.22 */
int32_t flight_destination_altitude; /* Flight destination altitude ASL (m) Q16.16 */
uint8_t automation_animation; /* Automation animation (0 means no animation in progress) */
uint8_t automation_flags; /* Automation features bit field
* - bit 0: follow-me enabled (0 = disabled, 1 = enabled)
* - bit 1: look-at-me enabled (0 = disabled, 1 = enabled)
* - bit 2: angle locked (0 = unlocked, 1 = locked)
* - bit 3-7: reserved for future use */
uint16_t reserved; /* Reserved for future use */
};
struct metadata_thermal_ext
{
uint16_t ext_id; /* Extension structure id = 0x4534 */
uint16_t ext_length; /* Extension structure size in 32 bits words excluding the
* ext_id and ext_size fields */
int16_t min_x; /* Minimum temperature spot x-coordinate (relative to frame width), Q11.5 */
int16_t min_y; /* Minimum temperature spot y-coordinate (relative to frame height), Q11.5 */
int16_t min_temp; /* Minimum temperature spot temperature value (K) Q11.5 */
int16_t max_x; /* Maximum temperature spot x-coordinate (relative to frame width), Q11.5 */
int16_t max_y; /* Maximum temperature spot y-coordinate (relative to frame height), Q11.5 */
int16_t max_temp; /* Maximum temperature spot temperature value (K) Q11.5 */
int16_t probe_x; /* Probe temperature x-coordinate (relative to frame width), Q11.5 */
int16_t probe_y; /* Probe temperature y-coordinate (relative to frame height), Q11.5 */
int16_t probe_temp; /* Probe temperature temperature value (K) Q11.5 */
uint8_t calib_state; /* Calibration state */
uint8_t flags; /* Validity flags
* - bit 0: minimum temperature spot (0 = invalid, 1 = valid)
* - bit 1: maximum temperature spot (0 = invalid, 1 = valid)
* - bit 2: probe temperature (0 = invalid, 1 = valid)
* - bit 3-7: reserved for future use */
};
Protobuf format (proto)#
Starting with Anafi Ai, the frame metadata use the protobuf (Google’s Protocol
Buffers) mecanism for serializing the data. This means that the binary data can
be decoded either by Parrot’s software (see about libvideo-metadata above), or
by any protobuf decoder in the language of your choice by using the format
described in the <SDK>/packages/libvideo-metadata/proto/vmeta.proto file
and below, see the TimedMetadata message.
This format is used for both recording and streaming metadata.
In the case of streaming, the value 0x5062 (Pb in ASCII) is used as
identifier (defined by profile RTP header extension field).